3 min read
Sols 4541–4542: Boxwork Structure, or Just “Box-Like” Structure?
Written by Ashley Stroupe, Mission Operations Engineer at NASA’s Jet Propulsion Laboratory
Earth planning date: Wednesday, May 14, 2025
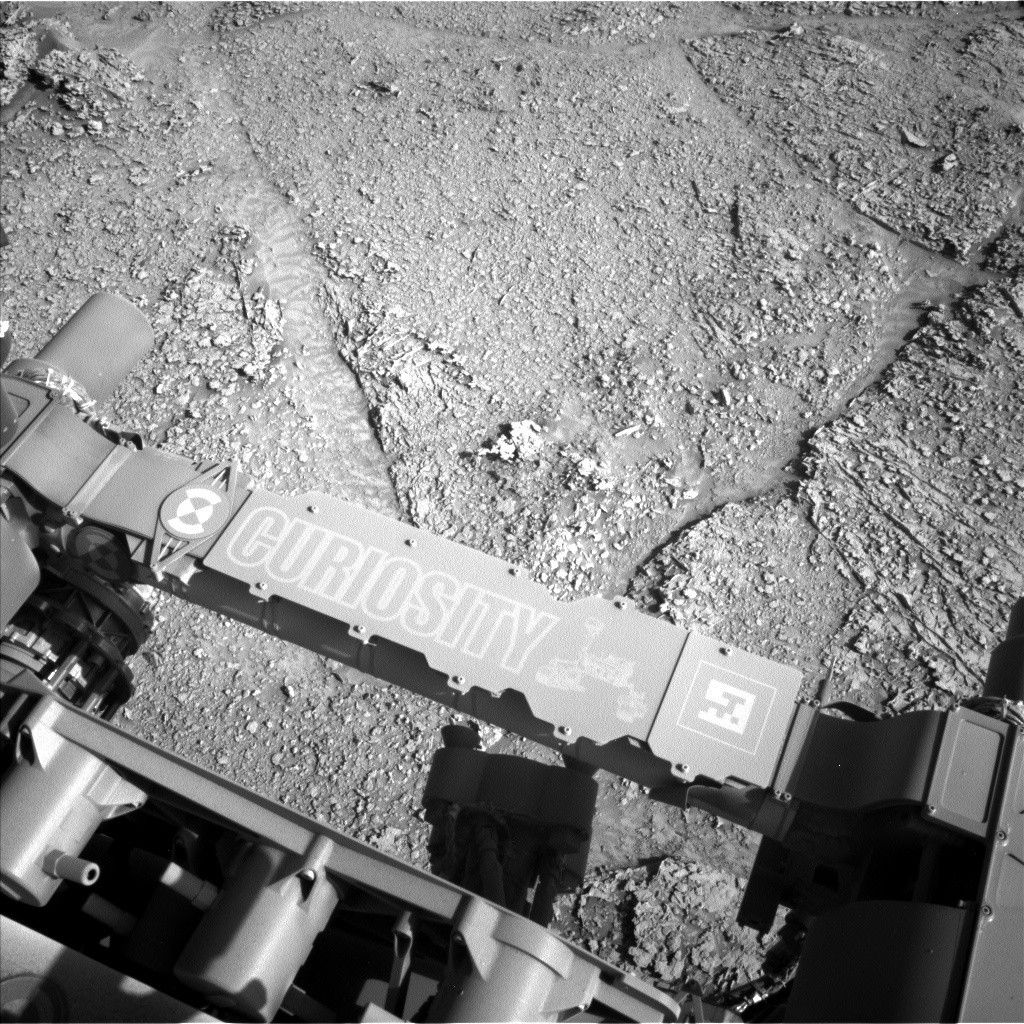
Today we came into another strange and interesting workspace (see image above) that is as exciting as the one we had on Monday. This is our first arrival at a potential boxwork structure — a series of web-like, resistant ridges visible in orbital images that we have been looking forward to visiting since we first saw them. Today’s observations will be the first step to figure out if these ridges (at least the one in front of us) is part of a boxwork structure. Unfortunately, we can’t quite reach their targets safely today because one of the rover’s front wheels is perched on a small pebble and might slip off if we move the arm. Instead, we will take a lot of remote sensing observations and reposition the rover slightly so that we can try again on Friday.
But before repositioning, Curiosity will start off by taking a huge Mastcam mosaic of all terrain around the rover to help us document how it is changing along our path and with elevation. Mastcam then will look at “Temblor Range,” which is a nearby low and resistant ridge that also has some rover tracks from where we previously crossed it. Mastcam is also imaging a trough that is similar to the other troughs we have been seeing locally and that have multiple possible origins. Then, Mastcam will image the AEGIS target from the prior plan. ChemCam is taking a LIBS observation of “Glendale Peak,” a rugged top portion of the ridge defining the potential boxwork structure, which is to the right of the workspace, and an RMI mosaic of Texoli butte. Mastcam follows up the ChemCam observation of Glendale Peak by imaging it.
In parallel with all the imaging is our monthly test and maintenance of our backup pump for the Heat Rejection System (the HRS) The HRS is a fluid loop that distributes the heat from the rover’s power source to help keep all the subsystems within reasonable temperatures. We need to periodically make sure it stays in good working order just in case our primary pump has issues.
After all the imaging, the rover will bump 30 centimeters backwards (about 12 inches) to come down off the pebble and put the interesting science targets in the arm workspace. This should leave us in a position where it is safe to unstow the arm and put instruments down on the surface.
On the second, untargeted sol of the plan, we have some additional atmospheric science including a large dust-devil survey, as well as a Navcam suprahorizon movie and a Mastcam solar tau to measure the dust in the atmosphere. We finish up with another autonomous targeting of ChemCam with AEGIS.